Lyapunov-Stable Tracking Control for Differentially Flat Wheeled Robots
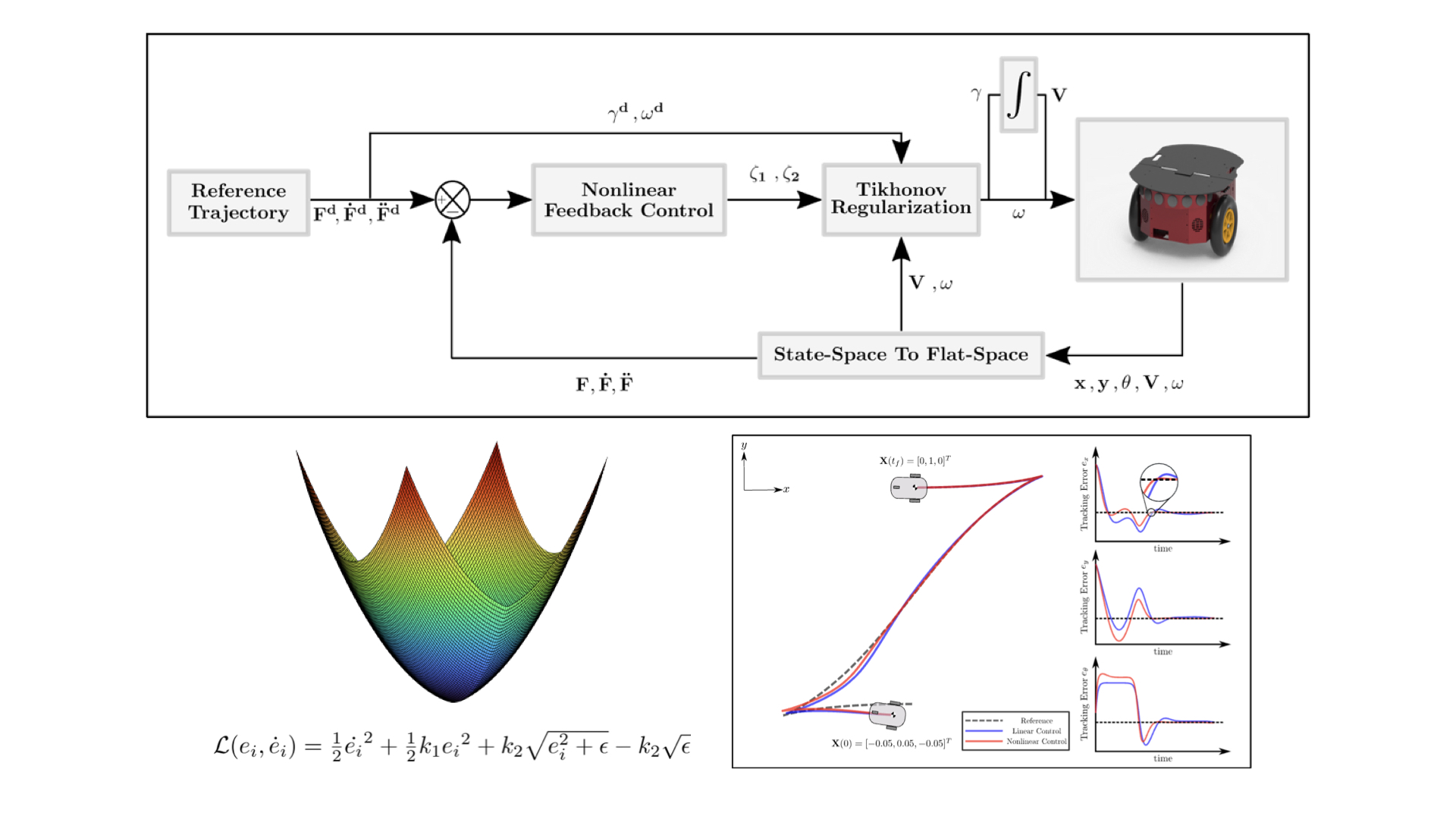
Overview : This project develops a Lyapunov-stable controller for wheeled mobile robots to track prescribed point-to-point trajectories. Leveraging the differential flatness of the robot’s kinematic model, the controller is designed in the flat output space and stabilized using a Lyapunov-based feedback law. To address potential singularities in mapping flat-space controls to physical coordinates, a Tikhonov regularization method is introduced. Benchmark trajectories, including parallel parking maneuvers parameterized with Jacobi elliptic functions, are used to evaluate performance.
🔍To see the image in full size, right-click on it.