Time-Optimal Context Sharing Between Global and Local Planners
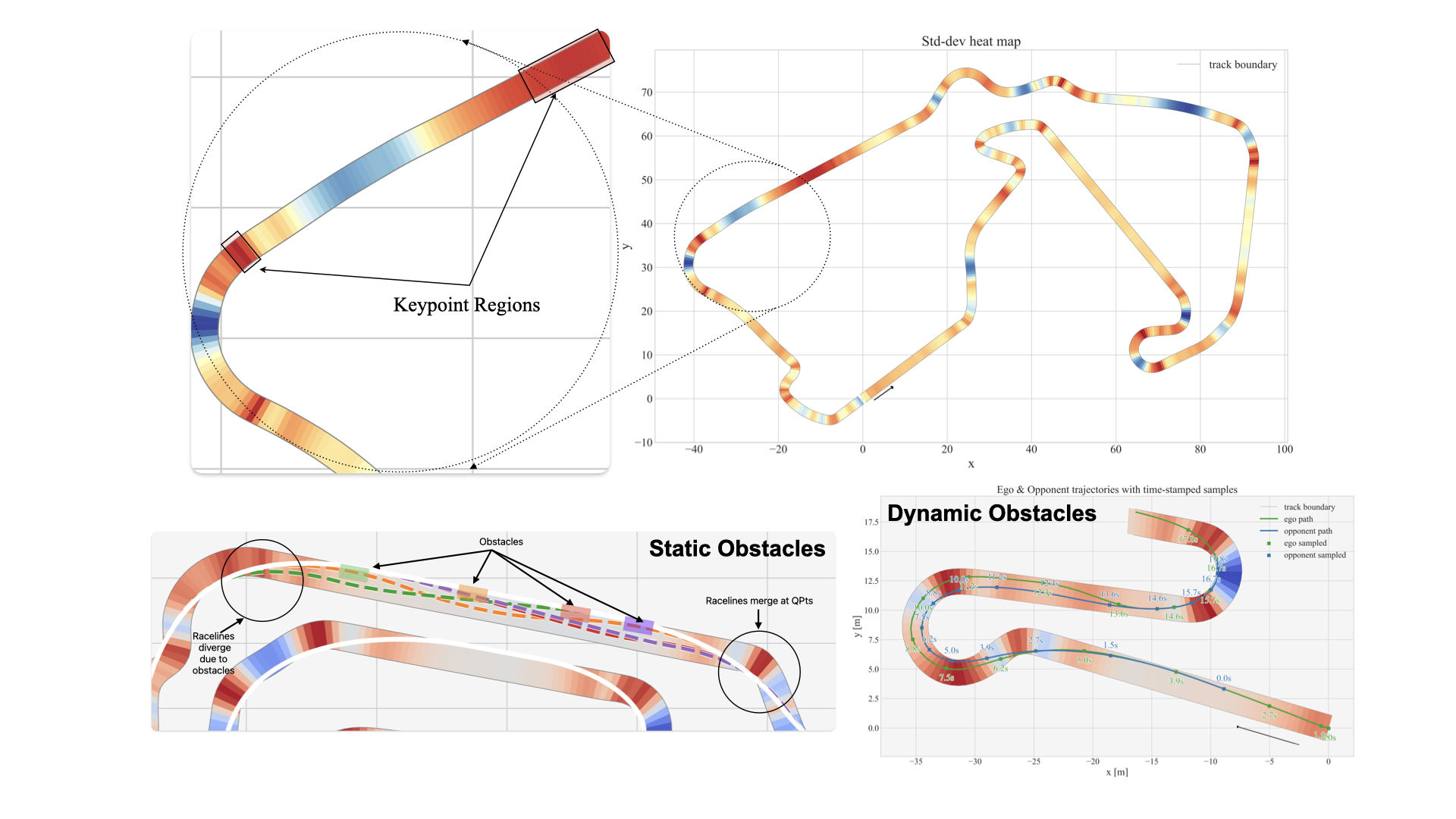
Overview : This project introduces a framework that transfers time-optimality insights from the global planner to the local planner. We identify key regions—points where deviating from the optimal raceline has a significant impact on performance—enabling the local planner to make globally informed decisions, such as strategic overtaking. When integrated into an existing local planner, this approach consistently achieves successful overtakes of opponents traveling at up to 75% of the ego vehicle’s speed across four different race tracks.
🔍To see the image in full size, right-click on it.